一、定义
二、推演
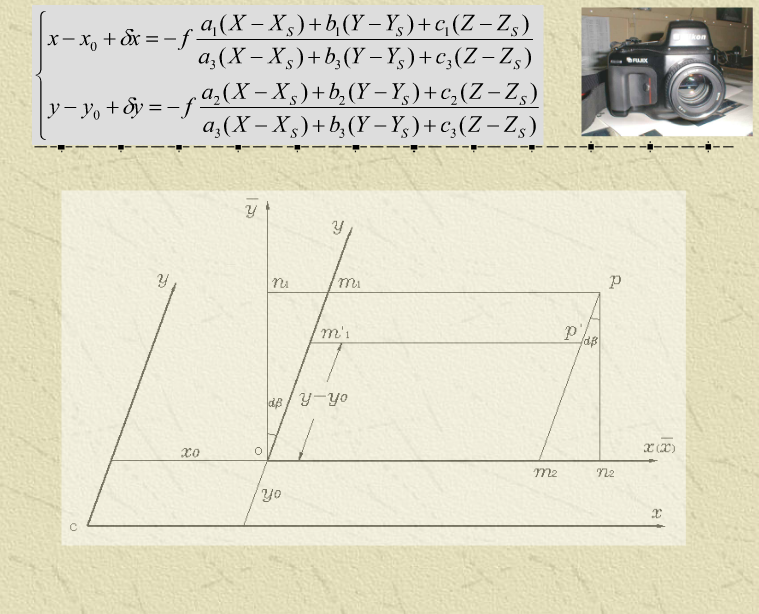
( x¯,y¯)[on2,on1] — 以像主点为原点,不包含线性误差的像点p的坐标;
[om2,om1] — 以像主点为原点包含不正交性 dβ 的坐标;
[om2,om1˙] — 以像主点为原点包含不正交性 dβ 误差及比例尺不一误差 ds 的像点p的坐标;
以上假设认为 x 轴方向无比例尺误差的影响。
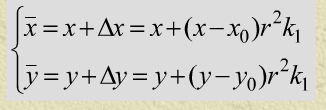
δx=on2−om2=m2p⋅sindβ=om1⋅sindβ=(1+ds)(y−y0)⋅sindβ≈(y−y0)⋅sindβ
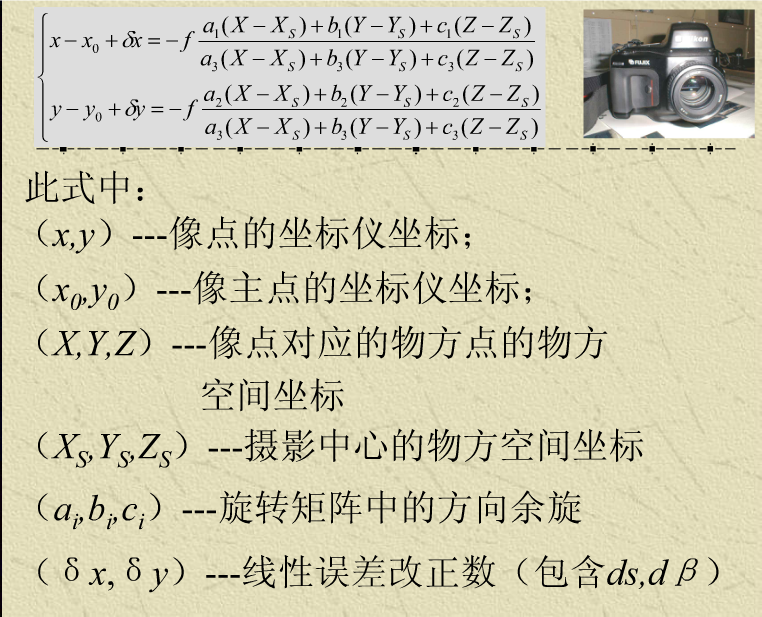
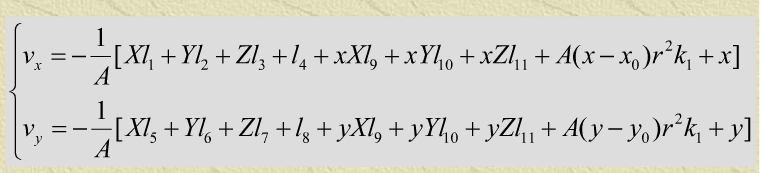
将δx,δy代入式中:
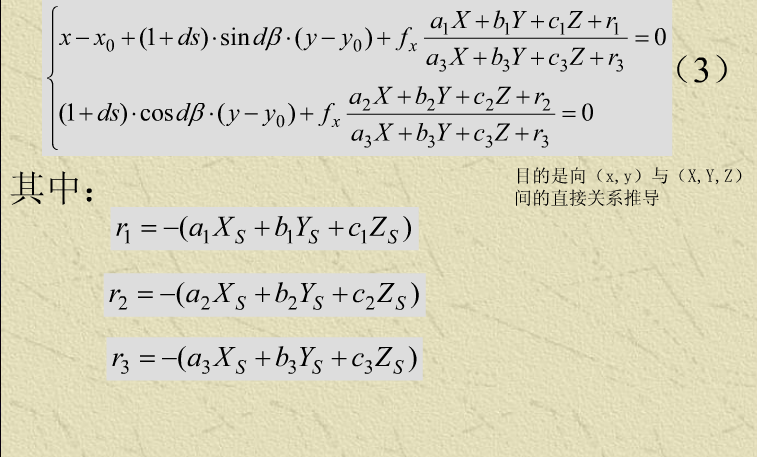
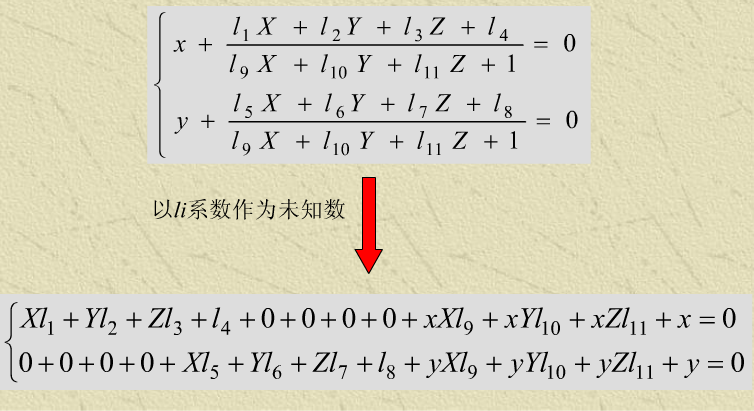
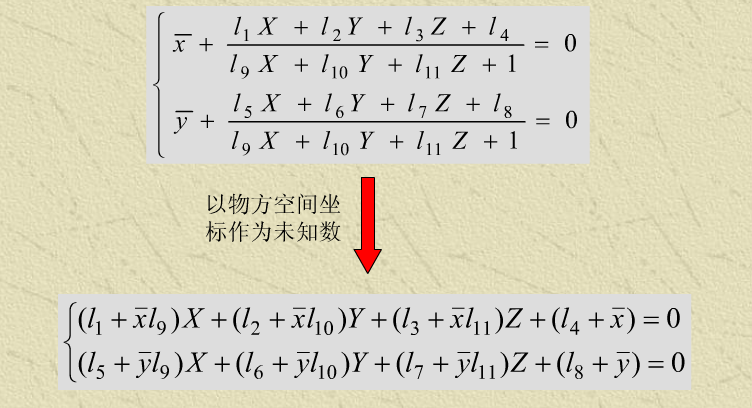
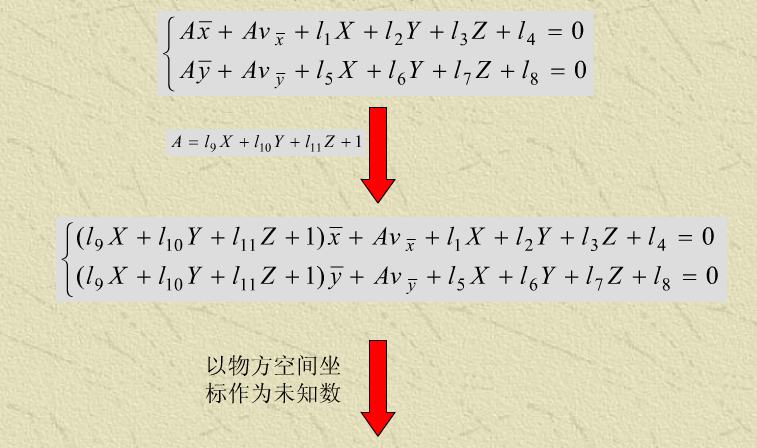
导出的基本关系式为(x,y)与(X,Y,Z)间的关系式,希望导出x=f(X,Y,Z),y=f(X,Y,Z)的形式:
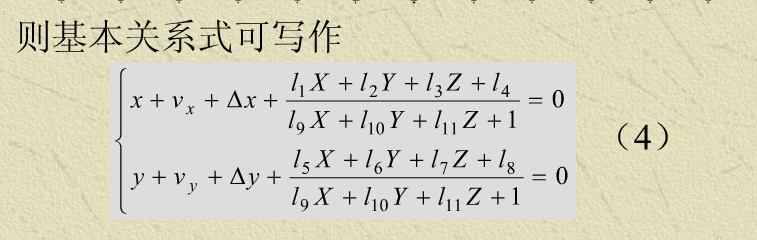
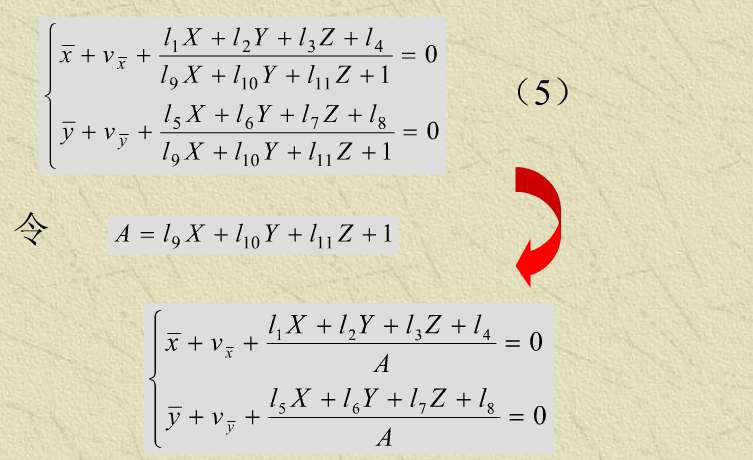
⎧⎩⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪x+l1X+l2Y+l3Z+l4l9X+l10Y+l11Z+1=0y+l5X+l6Y+l7Z+l8l9X+l10Y+l11Z+1=0
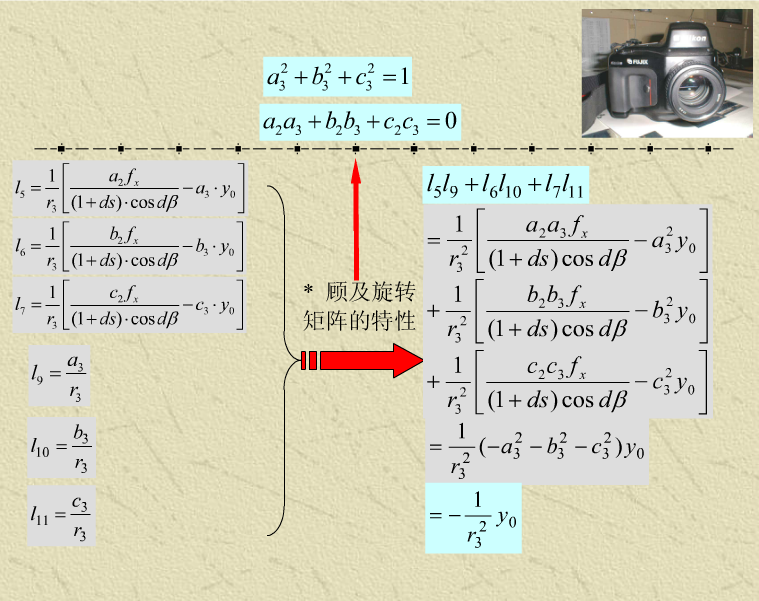
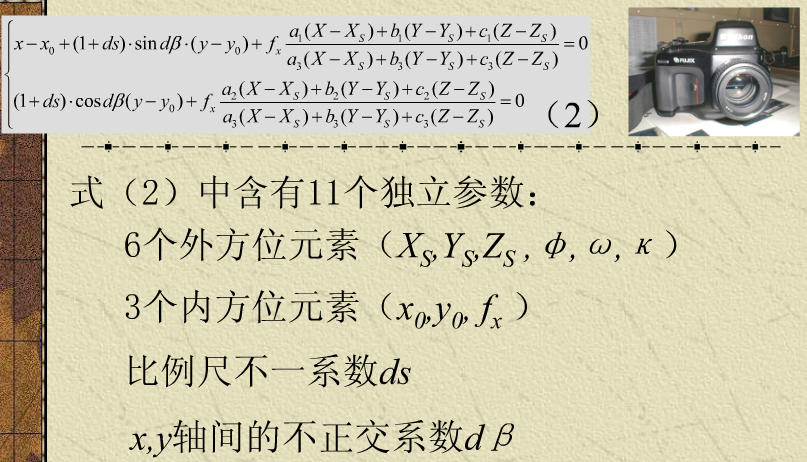
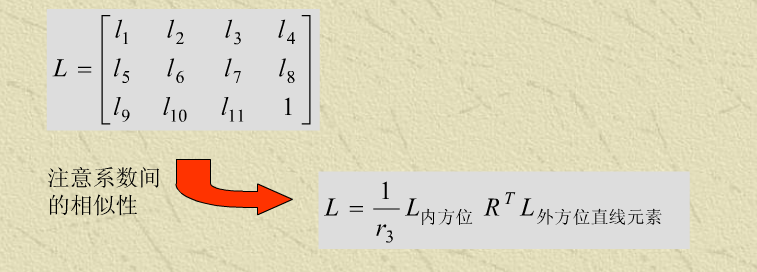
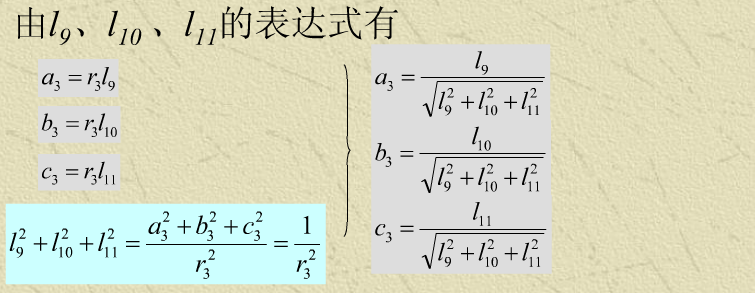
其中li(i=1,2...11) 的系数是
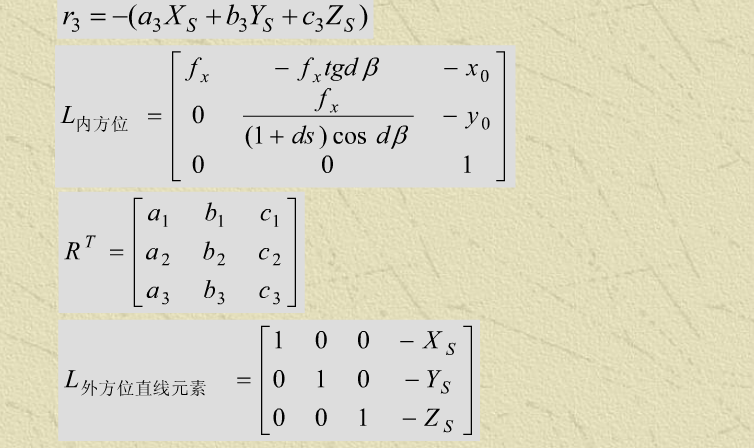
外方位元素(Xs,YS,Zs,f,w,k)
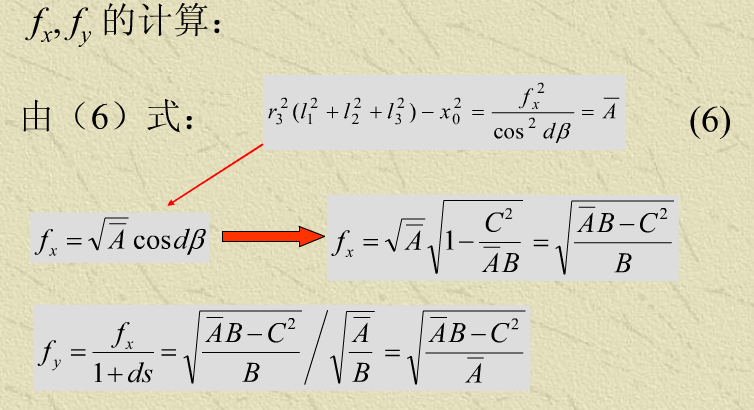
内方位元素(x0,y0,f)
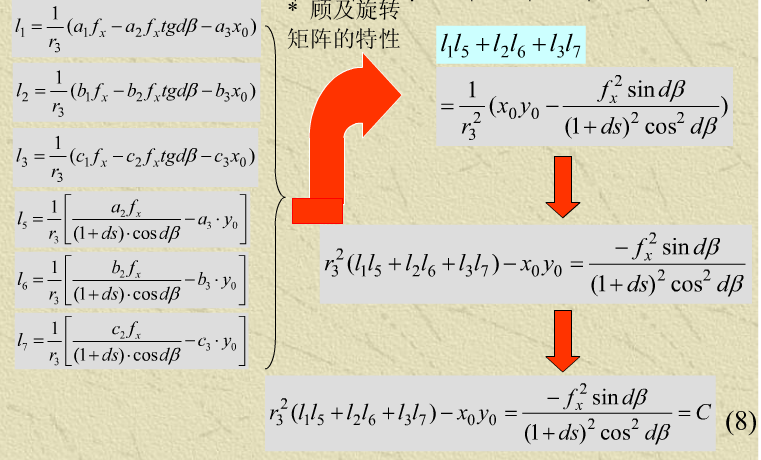
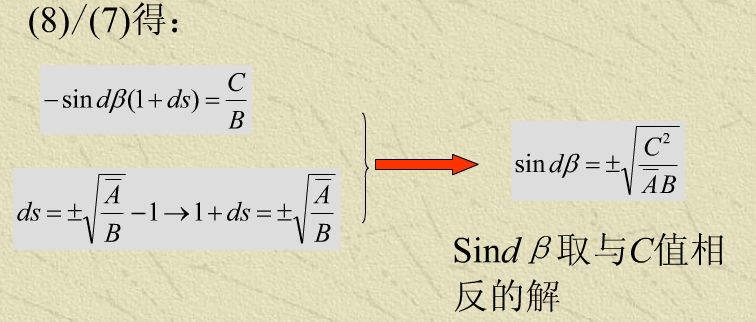
坐标轴不正交系数db
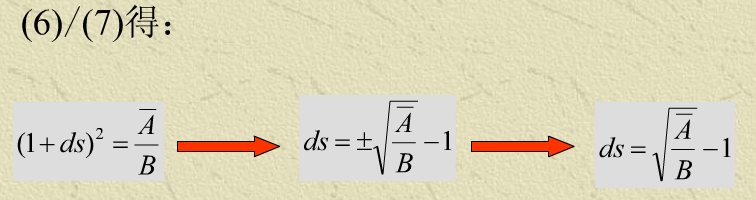
坐标轴比例不一系数dS
的函数
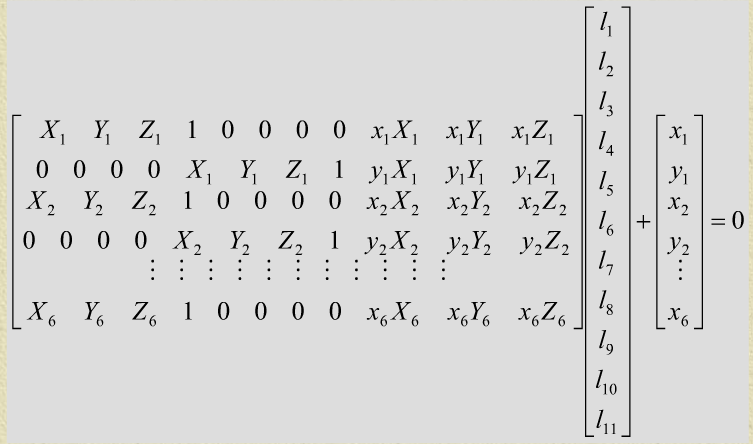
三、解算
li 系数近似值的解算
由物方空间控制点及对应的像点解算li系数近似值
li系数个数:11个
物方空间至少布置6个控制点
解算li系数的近似值,不需平差计算
只需选取11个方程解算11个li未知数
即,从控制点中挑出5.5个控制点,列11个方程解算
内方位元素x0,y0 的解算
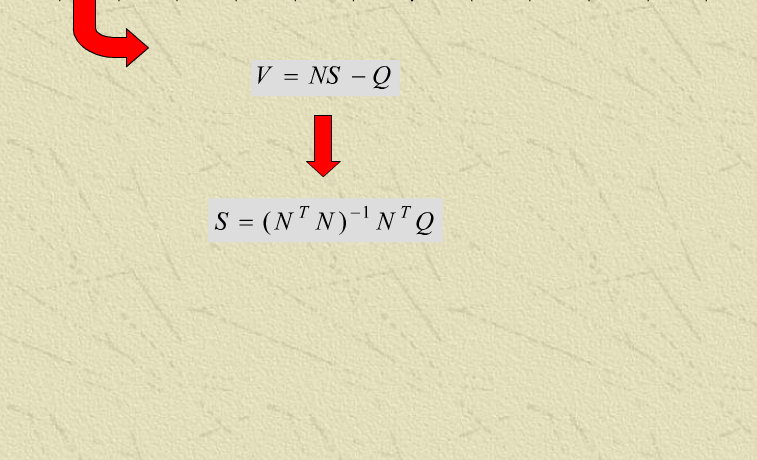
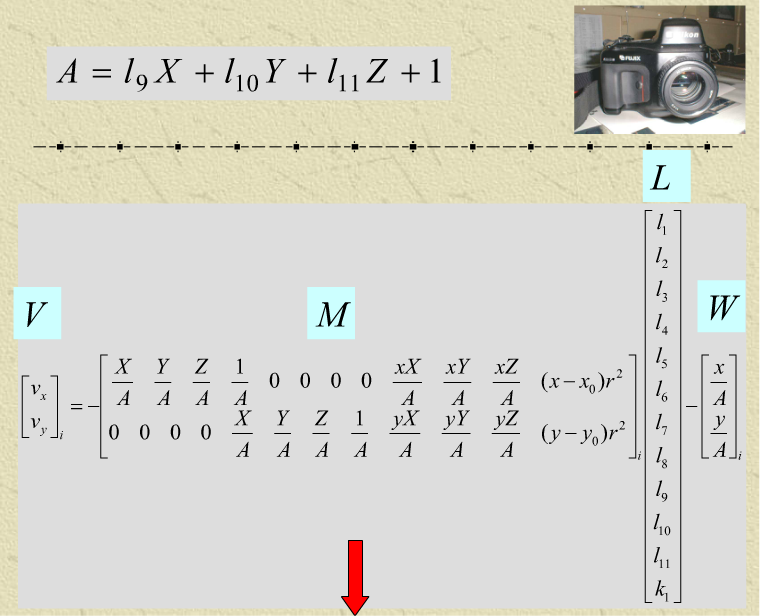
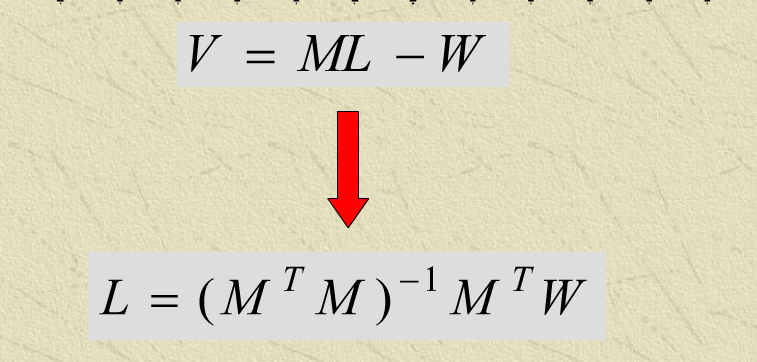
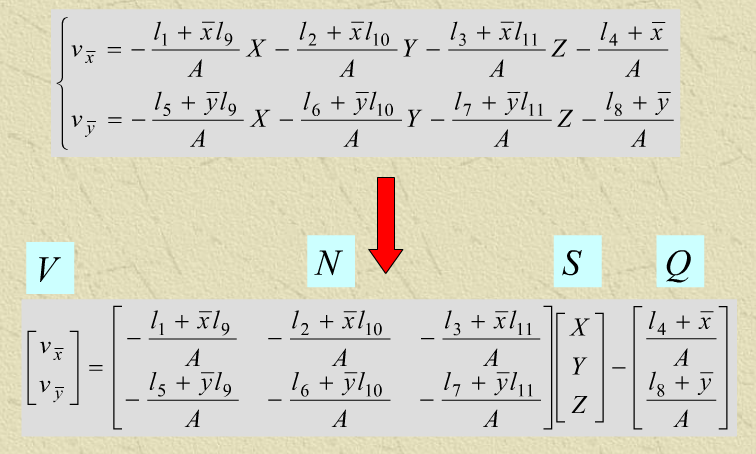
li系数精确值的解算
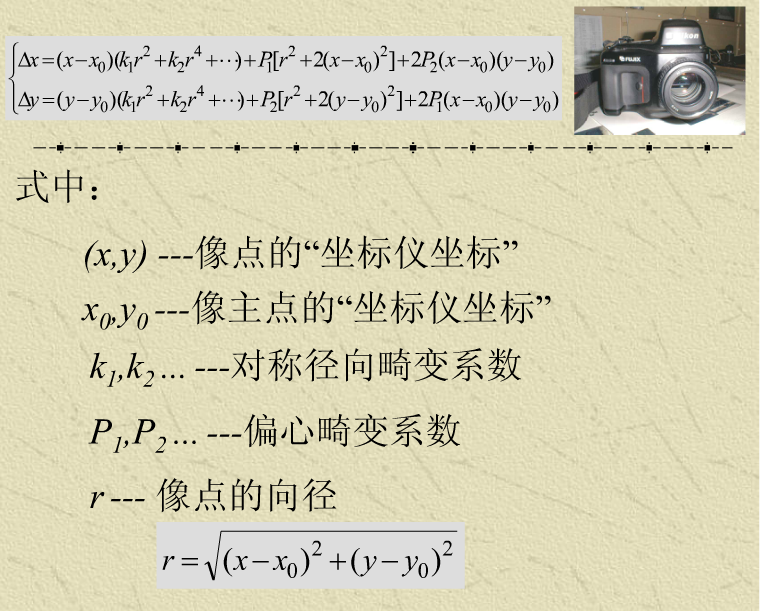
其中vx、vy 为控制点的像点“坐标仪坐标”观测值改正数。
A的计算过程也为迭代计算过程,每次迭代A值得计算是通过控制点求得的。
牛顿迭代法:
待定点像点“坐标仪”的系统误差改正
待定点物方空间坐标近似值的解算
由li系数精确解及带定点的像点“坐标仪坐标”解算
未知数个数:3个
所摄像片数至少 2张影片
只需要选取3个方程解算3个未知数
即,从两张以上的像片中挑出1.5张,列3个方程解算
待定点物方空间坐标精确值的解算·
内外方位元素及ds、dβ 的解算
http://www.doc88.com/p-1816848333772.html
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态