目录
摘要
1、介绍
符号表示:Table1 为本文中常见的符号表示
2、关于GFDS的推理
GFDs的可满足性问题
GFDs的蕴含问题
3、GFDS的不一致检测
4、三个算法的介绍
4.1顺序算法
4.2并行算法的介绍
4.2.1复制图的并行算法
4.2.2碎片图的算法
本文提出一种图函数依赖,称之为GFDs。
GFDs捕捉属性-值依赖和实体拓扑结构,并且包含了CFDs是一个特例。
GFDs的满意度和蕴含问题分别是coNP-complete和NP-complete,即满意度和蕴含问题分别是决定是否存在一个非空的图满足Σ中的所有GFDs和Σ是否包含GFD。。
GFDs的验证问题是coNP-complete的
提出了两种并行可测量的算法用于检测GFDs的违规
本文提出了大量的例子,以便于读者理解概念的含义
例1:(1)知识库中的不一致是常见的:
函数依赖(FD)能够探测但上述的不一致问题,也可以用FD来捕捉垃圾邮件。
本文提出了一种称为GFDs的图函数依赖,有两个约束:1、图形模式表示拓扑结构的约束,用于识别定义依赖关系的实体。2、一个CFDs的拓展,用于指定实体属性值的依赖关系。
GFDs包含了FDs和CFDs,用于捕捉相同实体或不同实体之间的属性的不一致。

图G = (V, E, L, FA)中,V表示有限的节点集合;E表示有限的边集合;L表示节点和边的标签可分为L(v)和L(e);FA(v)表示节点的属性与属性值的对应关系;
图形模式![]() ,VQ是模式结点的集合,EQ是模式边的集合;LQ是给节点还有边分配标签的函数;
,VQ是模式结点的集合,EQ是模式边的集合;LQ是给节点还有边分配标签的函数;![]() 是标量的列表;
是标量的列表;![]() 是参数数量,其等于节点的数量;µ是一个双射函数,将
是参数数量,其等于节点的数量;µ是一个双射函数,将![]() 映射到VQ中,或找到节点对应在
映射到VQ中,或找到节点对应在![]() 中对应的变量;使用通配符'_'作为特殊标签
中对应的变量;使用通配符'_'作为特殊标签
图形模式匹配:在图G上找到与模型Q同构的子图,这个子图G′= (V′, E′, L′, F′A);h是一个双射函数用于从节点VQ到节点VQ'的映射;而对于标签有LQ(u) = L′(h(u)),LQ(e) = L′(e') 其中e = (u, u′),e′= (h(u), h(u′))。当然若 LQ(u)是通配符"_",则LQ(u) = L′(h(u))总是成立。
![]() 是本文常使用的匹配向量,由h(x)组成。x是变量,
是本文常使用的匹配向量,由h(x)组成。x是变量,![]() 是变量的列表。
是变量的列表。
图函数依赖:GFDs ϕ = ![]() ,其中Q是图形模式,称为ϕ的模型;X和Y是两个
,其中Q是图形模式,称为ϕ的模型;X和Y是两个![]() 的两个字段集合。
的两个字段集合。
GFD ϕ指定了两个约束条件:1、由模式Q施加的拓扑约束。2、由X → Y指定的属性依赖。 即GFD既要被Q约束也要被函数依赖约束,Q规定了GFD的范围,使得依赖关系X → Y只施加在由Q标识的每个子图中的顶点的属性上
举几个例子以说明图、图形模式、图形模式匹配以及图函数依赖的关系:
先学习一个新的概念:
满足![]() ,首先将h(µ(x))表示为h(x),以后就用h(µ(x))表示为h(x)了,因为x本是一个字段,µ是根据这个字段找到其节点。若存在v=h(x)且v.A=c则
,首先将h(µ(x))表示为h(x),以后就用h(µ(x))表示为h(x)了,因为x本是一个字段,µ是根据这个字段找到其节点。若存在v=h(x)且v.A=c则![]() 满足c,若存在v=h(x)且v.A=y.B则
满足c,若存在v=h(x)且v.A=y.B则![]() 满足y.B。而若X内的所有字段,
满足y.B。而若X内的所有字段,![]() 都存在一个节点有满足字段的属性,则
都存在一个节点有满足字段的属性,则![]() 满足X,可表示为
满足X,可表示为![]() 。若X为空,则
。若X为空,则![]()
对所有的![]() ,若
,若![]() 则
则![]() ,我们说图G满足GFD
,我们说图G满足GFD![]() 记作G |=
记作G |= ![]() 。每当
。每当![]() 就有
就有![]() 则说明
则说明![]() 。若
。若![]() 不满足X则
不满足X则![]() 无论满不满足Y都
无论满不满足Y都![]() 都成立,但是若
都成立,但是若![]() 满足X,则
满足X,则![]() 必须满足Y,
必须满足Y,![]() 才能成立,这就跟普通的蕴含关系一样,当X真时,Y必须为真,不然X->Y就为假了。
才能成立,这就跟普通的蕴含关系一样,当X真时,Y必须为真,不然X->Y就为假了。
例1、![]() ,其中X1是
,其中X1是![]() ,Y1由
,Y1由![]() 和
和![]() 组成。由Q1所示,x1为flight id,x2为flight出发的city,x3为flight到达的城市等。y1,y2,y3,y4,y5也是如此。因此GFD
组成。由Q1所示,x1为flight id,x2为flight出发的city,x3为flight到达的城市等。y1,y2,y3,y4,y5也是如此。因此GFD ![]() 表示若实体x和y有相同的flight id则它们的离开城市以及目的地一定一样。但是从图中可以看出
表示若实体x和y有相同的flight id则它们的离开城市以及目的地一定一样。但是从图中可以看出![]() ,因为
,因为![]() 但是
但是![]() 不满足Y:
不满足Y:![]() 是因为h(x1).val=DL1,h(y1).val=DL1,则h(x1)=h(y1),X1是
是因为h(x1).val=DL1,h(y1).val=DL1,则h(x1)=h(y1),X1是![]() 。但是h(x3).val=NYC,h(y3).val=Singapore,二者不相等,所以
。但是h(x3).val=NYC,h(y3).val=Singapore,二者不相等,所以![]() 不满足Y。所以
不满足Y。所以![]()

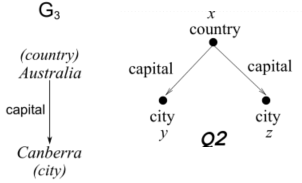
例2、![]() ,次GFD表示没有实体能够满足y.val和z.val,因为X为空,所以有GFD满足X,可以推出GFD必须要满足Y,则这个GFD才成立。如下图所示通过图形模式匹配有h(µ(y))和h(µ(z))都是表示Canberra,所以二者值相等,所以GFD满足X->Y,所以
,次GFD表示没有实体能够满足y.val和z.val,因为X为空,所以有GFD满足X,可以推出GFD必须要满足Y,则这个GFD才成立。如下图所示通过图形模式匹配有h(µ(y))和h(µ(z))都是表示Canberra,所以二者值相等,所以GFD满足X->Y,所以![]() 。
。
例3、![]() 可以表示为x必须有一个属性A,不然这个图就不满足GFD了。
可以表示为x必须有一个属性A,不然这个图就不满足GFD了。
定理1:GFDs的可满足性问题是coNP-complete的
推论2: 定义于有向无环图的常数GFDs,其可满足性问题是coNP-complete的
引理3:当且仅当Σ不冲突时,GFDs集Σ是可满足的。
推论4:如果满足下列条件之一,GFDs的集合Σ总是可满足的:
1、Σ仅由变量GFDs组成
2、Σ不包含形式为![]() 的GFDs
的GFDs
定理5、GFDs的蕴含问题是NP-complete的
推论6、当所有的GFDs都被定义为DAG模式,并且它们都没有形式![]() 时,仅对于常数GFDs和变量CFDs,蕴含问题是NP-complete。
时,仅对于常数GFDs和变量CFDs,蕴含问题是NP-complete。
引理7、对于![]() 和一个GFDs集合Σ,有Σ|=ϕ,当且仅当Y可以从Σ和X中扣除.
和一个GFDs集合Σ,有Σ|=ϕ,当且仅当Y可以从Σ和X中扣除.
推论8、用树结构模式定义的GFDs的蕴含问题是PTIME的
命题9、GFDs的验证问题是coNP-complete。
定理10、存在并行可测量的算法,给一个GFDs集合Σ和一个复制到n个处理器的图G,在![]()
![]() 并行时间内计算Vio(Σ,G)
并行时间内计算Vio(Σ,G)
定理11、存在并行可测量的算法,给定一个GFDs集合Σ,一个分好了的图G和n个处理器,计算Vio(Σ, G)在![]()
![]() 并行时间内。
并行时间内。
若![]() ,则我们说
,则我们说![]() 违反了
违反了![]() ,其中GFD
,其中GFD![]() ,
,![]() 是G根据图模式Q使用
是G根据图模式Q使用![]() 匹配到的一个子图。我们将所有违反的
匹配到的一个子图。我们将所有违反的![]() 添加到一个违规集合Vio(Σ, G)里。
添加到一个违规集合Vio(Σ, G)里。
而我们所谓的错误检测就是输入一个GFDs集合 Σ和一个图G,会有输出一个违反集合Vio(Σ, G)。我们称这个决策问题为GFDs的验证问题,用于判断是否G |= Σ,当然只有违反集合Vio(Σ, G)为空时,G |= Σ。
此算法使用了一个GFDs集合Σ,一个图G,一个单处理器来计算违反集合Vio(Σ, G)。我们称这个算法为detVio
执行如下:
刚开始时Vio(Σ, G) = ∅。枚举G中的模式Q中的所有![]() ,检查是否存在
,检查是否存在![]() 即是否存在
即是否存在![]() ,若违反了就添加
,若违反了就添加![]() 到Vio(Σ, G)。
到Vio(Σ, G)。
这种算法非常简单,执行起来的时间复杂度非常非常得高,所以对于大图来说是禁止的。
以上算法复杂度这么高,因此我们提出了一个用于解决此问题的并行算法,也就是复制图的并行算法和碎片图的并行算法
首先介绍一下新的符号和概念:
W(Σ, G)表示工作量,是算法计算所有违反集合Vio(Σ, G)所需要的消耗
t(|Σ|,|G|)表示最好的顺序算法在计算Vio(Σ, G)所消耗的时间
T(|Σ|,|G|, n)表示使用n个处理器通过并行算法来计算Vio(Σ, G)所使用的时间
![]() 表示Q的最大连通分量;
表示Q的最大连通分量;![]() 称为GFD的轴(pivot);
称为GFD的轴(pivot);![]() 是连通分量
是连通分量![]() 的具有最小半径节点的标签,可通过
的具有最小半径节点的标签,可通过![]() 获得
获得![]() 对应的节点;使用
对应的节点;使用![]() 表示
表示![]() 半径的大小;使用
半径的大小;使用![]() 表示
表示![]() 称之为GFD的轴向量(pivot vector);如下图所示
称之为GFD的轴向量(pivot vector);如下图所示![]()
![]() 和
和![]() 的轴向量分别是((x,1),(y,1)), ((x,1)), ((x,0),(y,0))和((x,3))
的轴向量分别是((x,1),(y,1)), ((x,1)), ((x,0),(y,0))和((x,3))

σ 是一个一对一的映射,从![]() 映射到G中的节点,
映射到G中的节点,![]() 就是上面介绍的轴向量;
就是上面介绍的轴向量;![]() 和
和![]() 是不一样的,前者表示G中的节点,后者表示Q中的节点,
是不一样的,前者表示G中的节点,后者表示Q中的节点,![]() 是
是![]() 的候选(candidate),当然它俩是对应的,分享相同的标签。
的候选(candidate),当然它俩是对应的,分享相同的标签。
![]() 其中
其中![]()
![]() 是G中的片段,子图
是G中的片段,子图![]() 是对所有
是对所有![]() 的
的![]() 邻居
邻居![]() ,它大于模型Q对应的子图
,它大于模型Q对应的子图![]() 。我们称
。我们称![]() 为图G中
为图G中![]() 的轴候选(pivot candidate)
的轴候选(pivot candidate)
W(Σ, G)是所有![]() 的集合符号表示为
的集合符号表示为![]() ;
;![]() 是
是![]() 中所有的连通分量Qi的标签
中所有的连通分量Qi的标签![]() 对应的轴候选
对应的轴候选![]() 与其对应的G的子图组成的
与其对应的G的子图组成的![]() 集合,一般只有1-2个,毕竟Q中的连通分量一般都是1-2个,可以看出W(Σ, G)包含
集合,一般只有1-2个,毕竟Q中的连通分量一般都是1-2个,可以看出W(Σ, G)包含![]() ,
,![]() 包含
包含![]() ,三者是包含关系。
,三者是包含关系。
上面我们通过Q进行匹配得到的子图![]() 小于通过
小于通过![]() 得到的
得到的![]() 小于图G,如果使用
小于图G,如果使用![]() 来进行枚举,那么复杂度将会远小于使用G来进行枚举。
来进行枚举,那么复杂度将会远小于使用G来进行枚举。
若![]() 我们说错误测量算法是并行可测量的,当
我们说错误测量算法是并行可测量的,当![]() 时
时![]() 成立,其中c和l是常数。直觉上使用的处理器数量越多则使用的时间越少,当然在下面的章节会论述这个直觉的错误的。
成立,其中c和l是常数。直觉上使用的处理器数量越多则使用的时间越少,当然在下面的章节会论述这个直觉的错误的。
命题12: 1、负载平衡问题是NP-complete的。2、给定Σ, n和W(Σ, G),在O(n|W(Σ, G)| + |W(Σ, G)| log|W(Σ, G)|) 时间内有一个2-近似算法来寻找平衡的工作负载分区
此算法先将图G复制到每一个处理器上,我们所要做的就是将工作量均匀的分配到每一个处理器上。
算法名称为repVal,由一个协调器![]() 和n个处理器
和n个处理器![]() 组成。协调器上运行了一个程序bPar,处理器上并行地运行了程序localVio,运行过程为:
组成。协调器上运行了一个程序bPar,处理器上并行地运行了程序localVio,运行过程为:
协调器的程序bPar先将工作量W(Σ, G)均匀地分为![]() ,然后将n个
,然后将n个![]() 分别发送到n个处理器上。处理器上的程序localVio收到工作量之后,开始检测违规,并将违规放入
分别发送到n个处理器上。处理器上的程序localVio收到工作量之后,开始检测违规,并将违规放入![]() ,处理完之后localVio将
,处理完之后localVio将![]() 返回给bPar,bPar再将所有的
返回给bPar,bPar再将所有的![]() 合并成一个Vio(Σ, G)。过程如下图所示:
合并成一个Vio(Σ, G)。过程如下图所示:

bPar是怎样进行工作量均匀分配的呢?
![]() ,其中X1是
,其中X1是![]() ,Y1由
,Y1由![]() 和
和![]() 组成。
组成。
举个例子:我们使用flight的图和图模式,假设G1有9架飞机flight1–flight9,使用范围为n=3的分区有:![]() ,然后根据分区再产生m=3个M,其中
,然后根据分区再产生m=3个M,其中![]() ,rflight和rflight'分别对应Q1中的x x1 x2 x3 和y y1 y2 y3。可以算出
,rflight和rflight'分别对应Q1中的x x1 x2 x3 和y y1 y2 y3。可以算出![]()
![]() M2包含了4-6,4-6和4-6,7-9. M3包含了7-9,7-9和7-9,1-3. bPar将M1、M2、M3分别发送个3个处理器,交由3个处理器处理。
M2包含了4-6,4-6和4-6,7-9. M3包含了7-9,7-9和7-9,1-3. bPar将M1、M2、M3分别发送个3个处理器,交由3个处理器处理。
若![]() 收到9个工作单元{w1, . . . , w9}且评估大小为{22,22,26,26,30,30,24,28,28},则
收到9个工作单元{w1, . . . , w9}且评估大小为{22,22,26,26,30,30,24,28,28},则![]() 的贪婪分配策略根据评估生成了一个3分区工作单位{{w1, w3, w9},{w2, w4, w5},{w6, w7, w8}},之后再将之分到处理器S1, S2, S3。
的贪婪分配策略根据评估生成了一个3分区工作单位{{w1, w3, w9},{w2, w4, w5},{w6, w7, w8}},之后再将之分到处理器S1, S2, S3。
localVio是如何进行工作的呢?
localVio通过![]() =
=![]() ,这里有两个连通分量所以k等于2,
,这里有两个连通分量所以k等于2,![]() 等于1,
等于1,![]() 表示x对应的flight;通过PV可以得到G的子图
表示x对应的flight;通过PV可以得到G的子图![]()
我们举例处理器s1收到的M1为![]() 。有
。有![]() 中z bar等于
中z bar等于![]() 其中
其中![]() ,可生成子图
,可生成子图![]() 。则有小工作量
。则有小工作量![]() 。例有
。例有![]() ,22表示
,22表示![]() 的节点和边数量总和为22. 然后localVio通过枚举的方法检测
的节点和边数量总和为22. 然后localVio通过枚举的方法检测![]() 是否满足GFD,若不满足则将
是否满足GFD,若不满足则将![]() 对应的那个h放入本地的 Vio(Σ, G),直到所有的h都尝试之后,返回本地的 Vio(Σ, G)给bPar
对应的那个h放入本地的 Vio(Σ, G),直到所有的h都尝试之后,返回本地的 Vio(Σ, G)给bPar
此算法论文没有举例,以后遇到再补充对此算法的使用简介,此处只说了一些定义。
命题13: (1)双标准分配问题是NP-complete (2)在![]() 时间内,存在一种2-近似算法来寻找具有最小通信成本的平衡工作负荷分配
时间内,存在一种2-近似算法来寻找具有最小通信成本的平衡工作负荷分配
本算法名为disVal。使用了一个协调器![]() 和n个处理器
和n个处理器![]() 。disPar首先评估且分区工作量 W(Σ, G),使得
。disPar首先评估且分区工作量 W(Σ, G),使得![]() 在每个处理器上都是平衡的,且通信成本最小化。之后每个处理器并行地使用程序dlocalVio来探测局部违规
在每个处理器上都是平衡的,且通信成本最小化。之后每个处理器并行地使用程序dlocalVio来探测局部违规![]() 。最终
。最终![]()
首先先介绍一下边界节点再介绍算法的详细工作流程:![]() 是等于图G;
是等于图G;![]() 是图G的子图;
是图G的子图;![]() ;每个子图都驻留在对应的处理器上;而边界节点由内节点和外节点组成,内节点是子图
;每个子图都驻留在对应的处理器上;而边界节点由内节点和外节点组成,内节点是子图![]() 中那些与其他碎片图有相连边的节点,因为
中那些与其他碎片图有相连边的节点,因为![]() 是直接从G上切割下来的图,那么就一定会有断掉的边,内节点就是
是直接从G上切割下来的图,那么就一定会有断掉的边,内节点就是![]() 中那些有断边的节点;外节点是原本与
中那些有断边的节点;外节点是原本与![]() 的内节点连接的其他碎片的节点。
的内节点连接的其他碎片的节点。
disPar拓展了bPar通过支持1、考虑通信成本的工作量估算 2、双标准分配(Bi-criteria assignment)
那么disPar是如何进行工作量评估的呢?
使用了轴向量![]()
![]() ,其中
,其中![]() 是在
是在![]() 里
里![]() 中的;
中的;![]() 的局部候选
的局部候选![]() 是在
是在![]() 中的;有G中
中的;有G中![]() 的
的![]() 邻居图
邻居图![]() ;
;![]() 中的边界节点
中的边界节点![]() ;部分工作单元
;部分工作单元![]() (即分配到各个处理器的工作)使用
(即分配到各个处理器的工作)使用![]() 表示;若
表示;若![]() 则
则![]() 使用占位符⊥表示;
使用占位符⊥表示;![]() 是
是![]() 组成的列表;
组成的列表;![]() 是
是![]() 组成的列表,表示丢失数据;
组成的列表,表示丢失数据;
若对于每个![]() 都一个来自
都一个来自![]() 的单元
的单元![]() 的候选
的候选![]() 则将
则将![]() 添加到
添加到![]() 中去;
中去;![]() 是
是![]() 的总和;
的总和;![]() 是
是![]() 的联合。注i ∈ [1, n]且
的联合。注i ∈ [1, n]且![]() ∈ Σ.
∈ Σ.
版权声明:本站所有资料均为网友推荐收集整理而来,仅供学习和研究交流使用。

工作时间:8:00-18:00
客服电话
电子邮件
admin@qq.com
扫码二维码
获取最新动态